When Movements Become Data: Open Data for Safer Human–Robot Interaction
For many, access to data is the first step in the research process, and when individual researchers choose to share their own, well-documented datasets openly, they make it easier for others to get started, verify findings, and build upon the results. They receive neither publishing points nor extra research time for this work, but they choose to spend their time making data accessible anyway, and we believe this should be rewarded with some extra attention.
Data Stories is a new series of interviews by the Library with HVL researchers on open data publishing. In this first interview, we meet Associate Professor Gizem Ateş Venås, who works with human-robot collaboration. She collects and analyses human movements for more intuitive and safe interaction with robots. Read the interview for insight into why open sharing matters, how the process went – and advice for those who want to share their own data.
What do you research, and what was the background for the project?
- I am a robot engineer who researches, among other things, human-robot collaboration. I specifically work on collecting and analysing human movements to make the control of and collaboration with robots more intuitive, natural, and safe.
What did you want to find out with the research?
- My goal is to find a natural interaction medium for collaboration between humans and robots in real industrial or medical applications. I believe that human movements contain a lot of essential information. I have worked extensively with IMUs; these are small sensors that measure movement and are easily accessible (for example, they are found in all smartphones), which also makes the research more accessible. Cameras are also used in my research field to measure human movements, but these have challenges in real industrial environments regarding changes in light conditions, blocking of the camera lens (occlusion), and calibration. Therefore, I focus mainly on non-visual sensor systems, and I claim that these can be just as reliable and useful in human-robot collaboration.
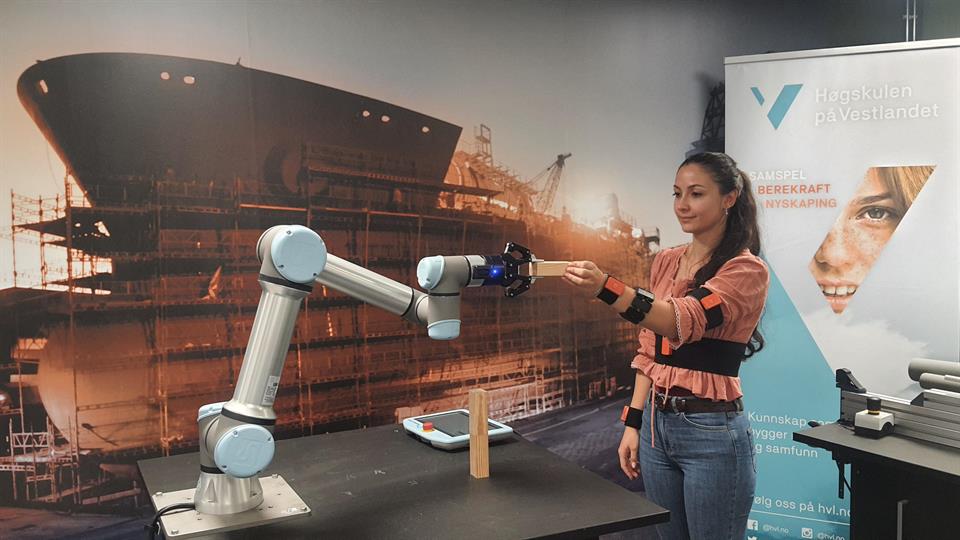
What does the dataset you have published contain?
- I collected this dataset during my PhD period. The experiment involved a human and a collaborative robot (a cobot) lifting a table together and placing it in another location. From 32 participants, I have collected all movement data, both as raw data from the IMU sensors and as human kinematic data (for example, the position of the right hand relative to the torso). Additionally, I have extracted robot positions (joint angles, end-effector position, etc.) and a "game score" – a numerical value showing how well they collaborated in each round. Each participant performed the same table-lifting experiment at least ten times.
How were the data collected?
- Within robotics, we commonly use the framework ROS (Robot Operating System). I used this system to collect both sensor data and robot data simultaneously in a so-called "rosbag" file. Later, I converted these to CSV format before publication so that it would be easier for others to use the data.

Who can benefit from the dataset?
- I see that many people are researching movement data for the human upper body. Today, robotics and AI have become two fields that are closely intertwined. Previously, almost everything was deterministic; we told the robot exactly how to move. Now, however, we can use hundreds of recorded sessions to "teach" the robot movement patterns using various AI models. I believe my dataset can be very useful in this context.
Why did you choose to publish data in Dataverse?
- I believe that data is crucial in today's research. Often, large companies own most of the available data, and it can cost a fortune to gain access. If we researchers make our non-sensitive data available to everyone, we can support progressive research to the best of our ability. The same applies to academic publications – we should preferably choose "open access" journals so that the results become available to everyone. Therefore, I chose to publish my data on Dataverse. Additionally, ROS, the system I used for data collection, is an open-source operating system. No one owns it, and engineers and researchers have developed it together since 2007. I support the concept of Open Science to the best of my ability.
How did you experience the process of making data available?
- There are some rules one should follow, for example, regarding file types and the content of the "readme" file. It is a bit complicated at the start, but with the good help I received from the university library, it went quite well. I have recommended this further to both my students and colleagues. The process was smooth, mostly because the library was always available when I had questions and gave me good guidance.
What tips would you give to others considering sharing data?
- Don't be afraid! Even though it can be perceived as "extra work" that provides no visible personal benefit, it is quite simple and useful for research in the long run. Research is a team effort – not just in our own research group, but for all researchers in the world. As researchers, we have a responsibility both to each other and to society. I believe that making data available is a very simple and important way to give something back to those we are responsible for.
What is the next step in your research?
- I have changed my focus somewhat after finishing my PhD. Many can probably recognize the feeling of having had "enough" of the field one has researched for several years, and that one is now curious about something else. I still work with human-robot collaboration, but I now spend more time researching what we call "foundation models" in robotics. Here, we show the robot a task, often through movement demonstrations – and teach it to perform the task itself without having to program everything statically. The robot becomes more resilient to changes in the environment. We use human movements as input for the robot movements, but not necessarily only IMU data. I still have some research ongoing within IMU-based analysis of human movements, but it is now at the supervision level and more aimed at robotics in rehabilitation and digital health. I also want to write a successful application to the RCN (NFR) or Horizon Europe – that is probably something all researchers dream of.
Do you plan to publish more datasets?
- I am in the process of publishing another dataset related to these experiments. This contains more qualitative data about how humans were affected by collaborating with a robot.
What do you like best about the everyday life of a researcher?
- I am a very curious person in general. I think it is a great luxury to have a job that fits my personality and the ethical values I care about. Not everyone is fortunate enough to have a job that gives them the opportunity to follow their curiosity, and therefore I feel privileged. As an associate professor, I also have teaching responsibilities and administrative responsibilities. So I am not just a researcher, but I see that as something positive as long as there is a good balance between the research and the other tasks.
What do you do when you are not researching?
- I love to knit and work in my garden! I have some planter boxes out in the garden where I grow edible plants in the summer, and I have about 50 non-edible plants inside the house. I also like yoga and swimming!
You can read more about research data and publishing on the HVL Library's website.
