Når rørsler blir data: open deling for tryggare menneske–robot-samspel
For mange er tilgang på data første steg i forskingsprosessen, og når enkelte forskarar vel å dele eigne, godt dokumenterte datasett ope, gjer dei det enklare for andre å kome i gang, etterprøve funn og byggje vidare på resultata. Dei får verken publiseringspoeng eller ekstra forskingstid for dette arbeidet, men vel likevel å bruke tida si på å gjere data tilgjengelege. Dette meiner vi bør belønnast med litt ekstra merksemd.
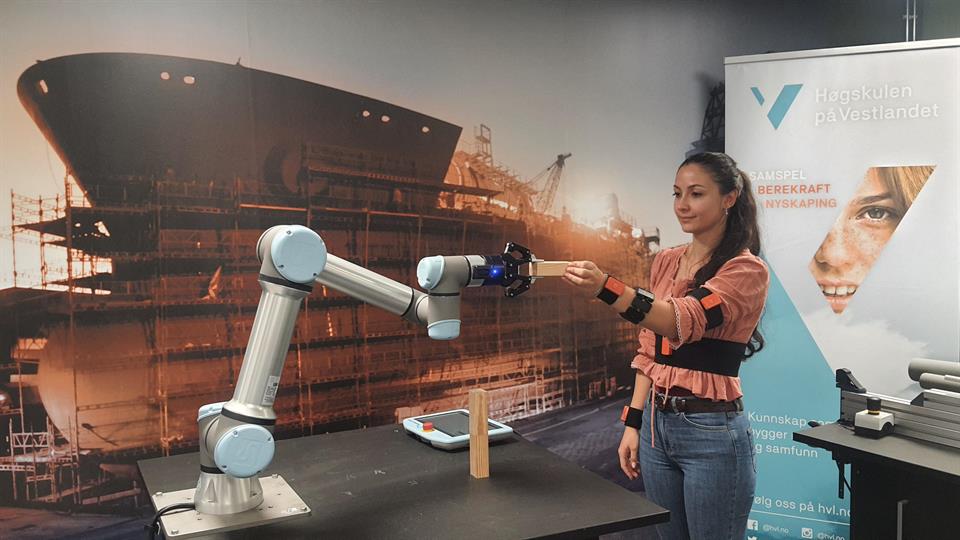
I ein ny serie frå HVL-biblioteket snakkar vi med forskarar om deling av forskingsdata. I dag møter vi førsteamanuensis Gizem Ateş Venås, som arbeider med menneske–robot-samarbeid. Ho samlar og analyserer menneskelege rørsler for meir intuitivt og trygt samspel med robotar. I intervjuet med henne nedanfor får du innsikt i kvifor open deling betyr noko, korleis prosessen gjekk – og råd til deg som vil dele eigne data.
Kva forskar du på, og kva var bakgrunnen for prosjektet?
- Eg er ein robot-ingeniør som forskar mellom anna på menneske-robot-samarbeid. Eg jobbar særleg med å samle og analysere menneskelege rørsler for å gjere styring av og samarbeid med robotar meir intuitivt, naturleg og trygt.
Kva ønskte du å finne ut med forskinga?
- Målet mitt er å finne eit naturleg interaksjonsmedium for samarbeid mellom menneske og robotar i reelle industrielle eller medisinske bruksområde. Eg meiner at menneskelege rørsler inneheld mykje vesentleg informasjon. Eg har arbeidd mykje med IMU-ar; dette er små sensorar som måler rørsler og som er lett tilgjengelege (til dømes finst dei i alle smarttelefonar), noko som og gjer forskinga meir tilgjengeleg. I mitt forskingsfelt er det fleire som også brukar kamera for å måle menneskelege rørsler, men kamera har utfordringar i reelle industrielle miljø ved endringar i lysforhold, blokkering av kameralinsa (okklusjon) og kalibrering. Derfor fokuserer eg i hovudsak på ikkje-visuelle sensorsystem. Eg påstår at desse kan vere like pålitelege og brukbare i menneske-robot-samarbeid.
Kva inneheld datasettet du har publisert?
- Eg samla inn dette datasettet i ph.d.-perioden min. Eksperimentet gjekk ut på at eit menneske og ein samarbeidande robot (ein cobot) skulle løfte eit bord saman og plassera det på ein annan stad. Frå 32 deltakarar har eg samla inn alt av rørsledata, både som rådata frå IMU-sensorane og som menneskelege kinematiske data (til dømes posisjonen til høgre hand i forhold til torso). I tillegg har eg henta ut robotposisjonar (leddvinklar, posisjon for endeeffektor osb.) og ein «game score» - ein numerisk verdi som viser kor godt dei samarbeidde i kvar omgang. Kvar deltakar utførte det same bordløft-eksperimentet minst ti gonger.
Korleis vart data samla inn?
- Innan robotikk er rammeverket ROS (Robot Operating System) ganske vanleg. Eg nytta dette systemet for å samle inn både sensordata og robotdata samstundes i ei såkalla «rosbag»-fil. Seinare konverterte eg desse til CSV-format før publisering, slik at det skal vere enklare for andre å ta i bruk dataa.

Kven kan ha nytte av datasettet?
- Eg ser at mange forskar på rørsledata for menneskeleg overkropp. I dag har robotikk og KI blitt to felt som er tett samanvevd. Tidlegare var nesten alt deterministisk; vi fortalde roboten nøyaktig korleis han skulle røre seg. No kan vi derimot bruke hundrevis av registrerte opptak for å «lære» roboten rørslemønster ved hjelp av ulike KI-modellar. Eg meiner at datasettet mitt kan vere svært nyttig i denne samanhengen.
Kvifor valde du å publisere data i Dataverse?
- Eg meiner at data er avgjerande i dagens forsking. Det er ofte store bedrifter som eig mesteparten av dei tilgjengelege data, og det kan koste skjorta å få tilgang. Om vi forskarar gjer dei ikkje-sensitive dataa våre tilgjengelege for alle, kan vi støtte progressiv forsking etter beste evne. Det same gjeld akademiske publikasjonar - vi bør helst velje «open access»-tidsskrift slik at resultata vert tilgjengelege for alle. Derfor valde eg å publisere dataa min på Dataverse. I tillegg er ROS, systemet eg nytta til datainnsamling, eit operativsystem med open kjeldekode. Ingen eig det, og ingeniørar og forskarar har utvikla det saman sidan 2007. Eg støttar konseptet om Open Science etter beste evne.
Korleis opplevde du prosessen med å gjere data tilgjengelege?
- Det er ein del reglar ein bør følgje, til dømes når det gjeld filtypar og innhald i «readme»-fila. Det er litt komplisert i starten, men med den gode hjelpa eg fekk frå universitetsbiblioteket, gjekk det ganske bra. Eg har anbefalt dette vidare til både studentane og kollegane mine. Prosessen var smooth, mest fordi biblioteket alltid var tilgjengeleg når eg hadde spørsmål, og gav meg god rettleiing.
Kva tips vil du gi til andre som vurderer å dele data?
- Ikkje bli redd! Sjølv om det kan oppfattast som «ekstraarbeid» som ikkje gjev nokon synleg personleg fordel, er det ganske enkelt og nyttig for forskinga på lang sikt. Forsking er eit lagarbeid - ikkje berre i vår eiga forskingsgruppe, men for alle forskarar i verda. Som forskarar har vi eit ansvar både overfor kvarandre og overfor samfunnet. Eg meiner at det å gjere data tilgjengeleg er ein svært enkel og viktig måte å gje noko tilbake til dei vi har ansvar for.
Kva er neste steg i forskinga di?
- Eg har endra fokus noko etter at eg blei ferdig med ph.d.-avhandlinga mi. Mange kan nok kjenne seg att i kjensla av å ha fått «nok» av det feltet ein har forska på i fleire år, og at ein no er nysgjerrig på noko anna. Eg jobbar framleis med menneske-robot-samarbeid, men brukar no meir tid på å forske på det vi kallar «foundation models» i robotikk. Her viser vi roboten ei oppgåve, ofte gjennom rørslademonstrasjonar - og lærer han å utføre oppgåva sjølv utan å måtte programmere alt fast. Roboten blir meir motstandsdyktig mot endringane i miljøet. Vi brukar menneskelege rørsler som input for robotrørslene, men ikkje nødvendigvis berre IMU-data. Eg har framleis ein del forsking på gang innan IMU-basert analyse av menneskelege rørsler, men det er no på rettleiingsnivå og meir retta mot robotikk i rehabilitering og digital helse. Eg har og lyst til å skrive ein vellykka søknad til NFR eller Horizon Europe - det er vel noko alle forskarar drøymar om 🙂
Planlegg du å publisere fleire datasett?
- Eg held på med å publisere eit anna datasett knytt til desse eksperimenta. Dette inneheld meir kvalitative data som handlar om korleis menneske blei påverka av å samarbeide med ein robot.
Kva likar du best ved forskarkvardagen?
- Eg er ein veldig nysgjerrig person generelt. Eg synest det er ein stor luksus å ha ein jobb som passar til personlegdomen min og dei etiske verdiane eg bryr meg om. Det er ikkje alle unt å ha ein jobb som gjev moglegheit til å følgje nysgjerrigheita si, og derfor kjenner eg meg privilegert. Som førsteamanuensis har eg òg undervisningsansvar og administrativt ansvar. Eg er altså ikkje berre forskar, men det ser eg på som noko positivt, så lenge det er ein god balanse mellom forskinga og dei andre oppgåvene.
Kva gjer du når du ikkje forskar?
- Eg elskar å strikke og jobbe i hagen min! Eg har nokre plantekassar ute i hagen der eg dyrkar etelege plantar om sommaren, og eg har kring 50 ikkje-etelege plantar inne i huset. Eg likar òg yoga og symjing!
Du kan lese meir om forskingsdata og publisering på nettsidene til HVL-biblioteket. 